Final Project for Introductory Mechatronics
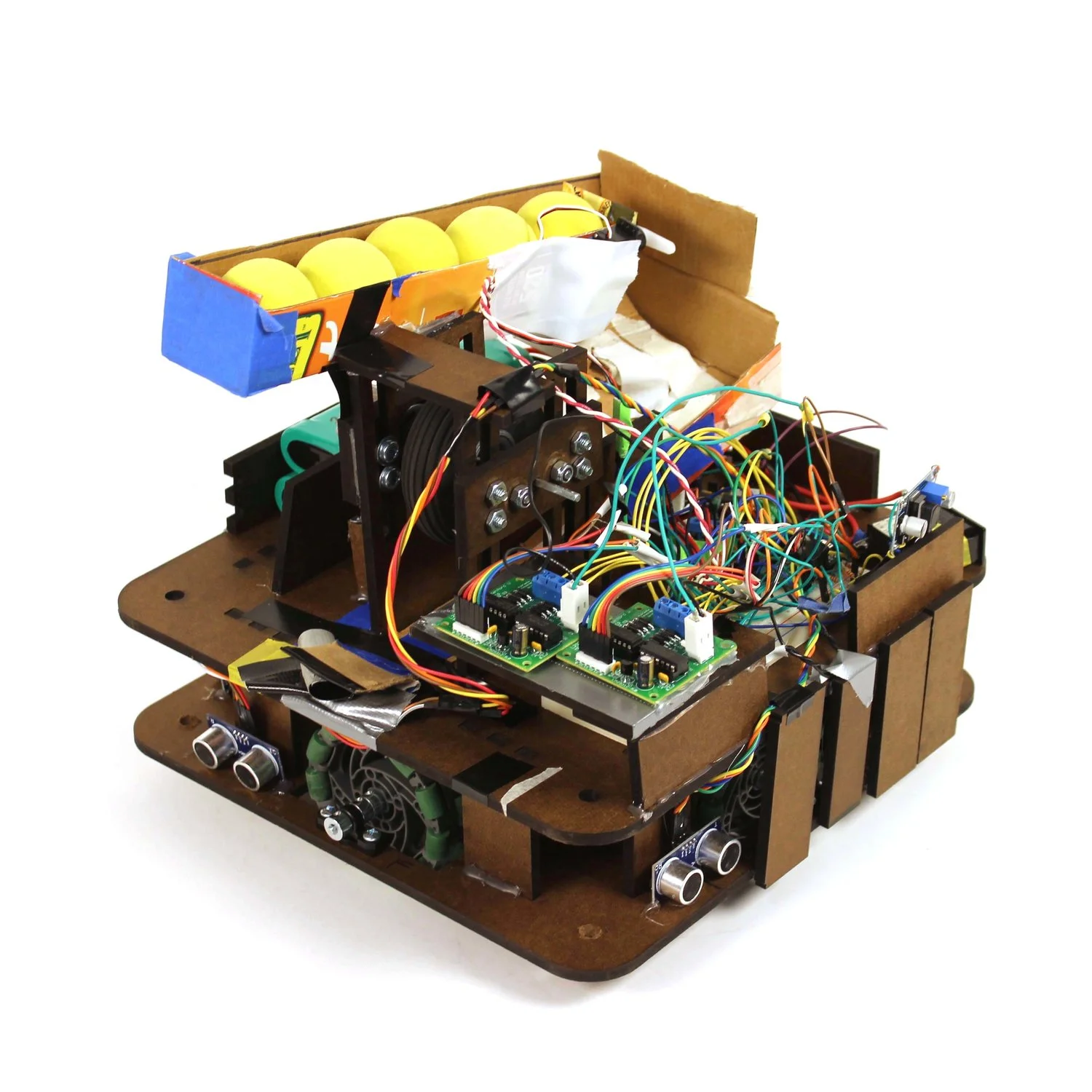
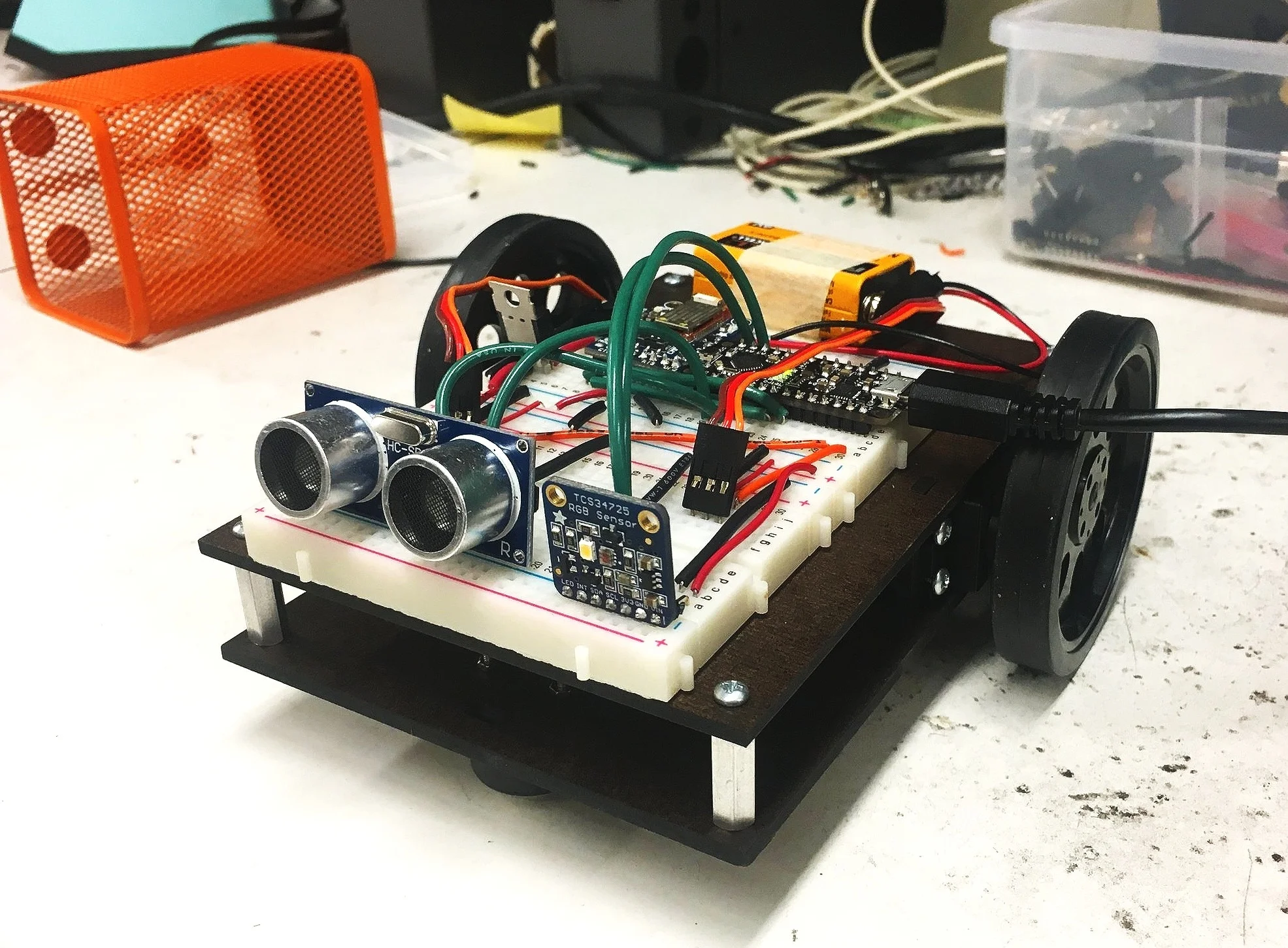
A bluetooth controlled robot car, self built, functionality written in arduino using an adafruit microcontroller and bluetooth controller.
Phone Tilt coded using phone's quarternation values converted into roll, pitch, and yaw and mapped to the servos.