Mynoch - jumping robot
final project - Mechanical Systems Design
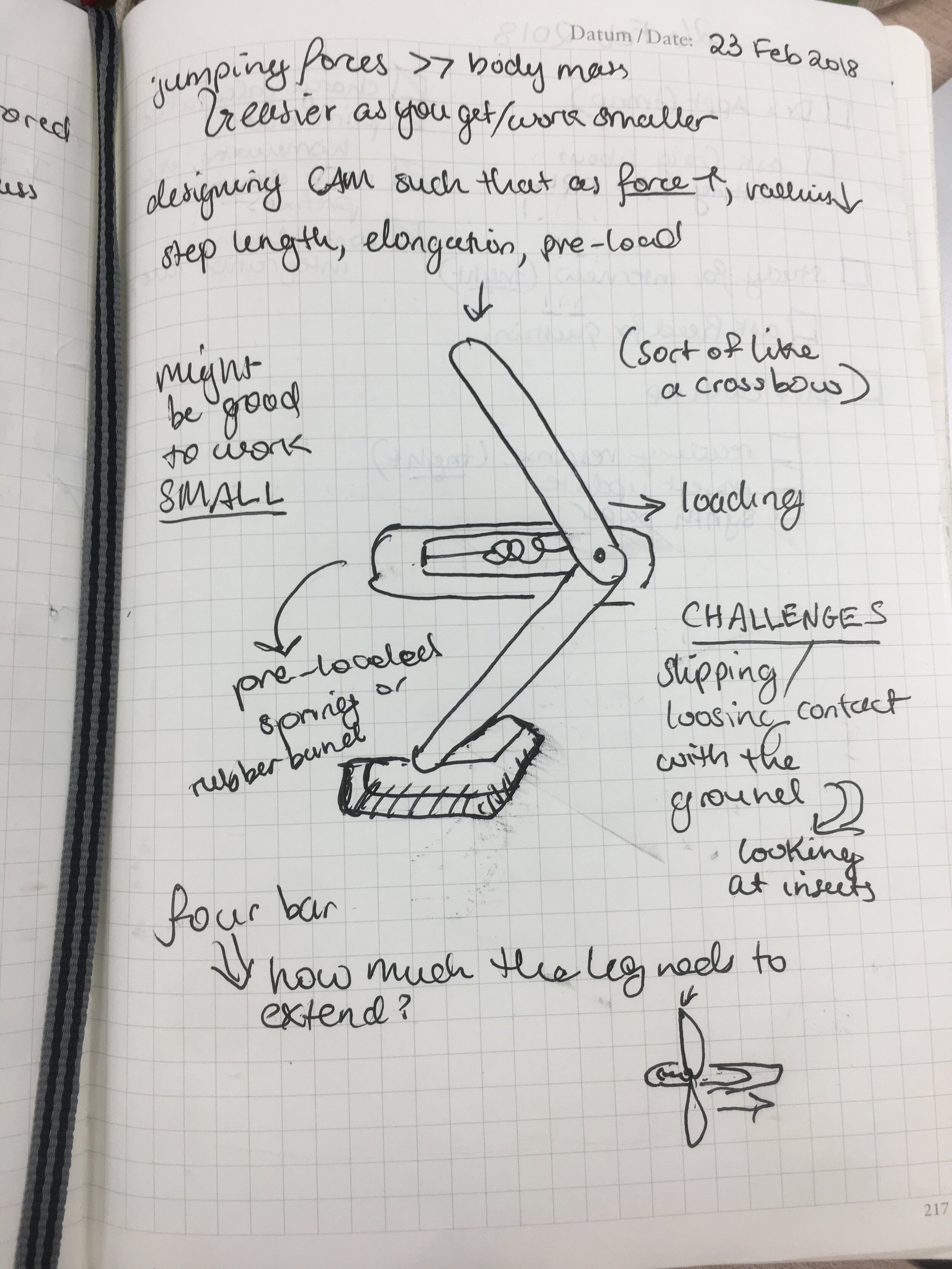
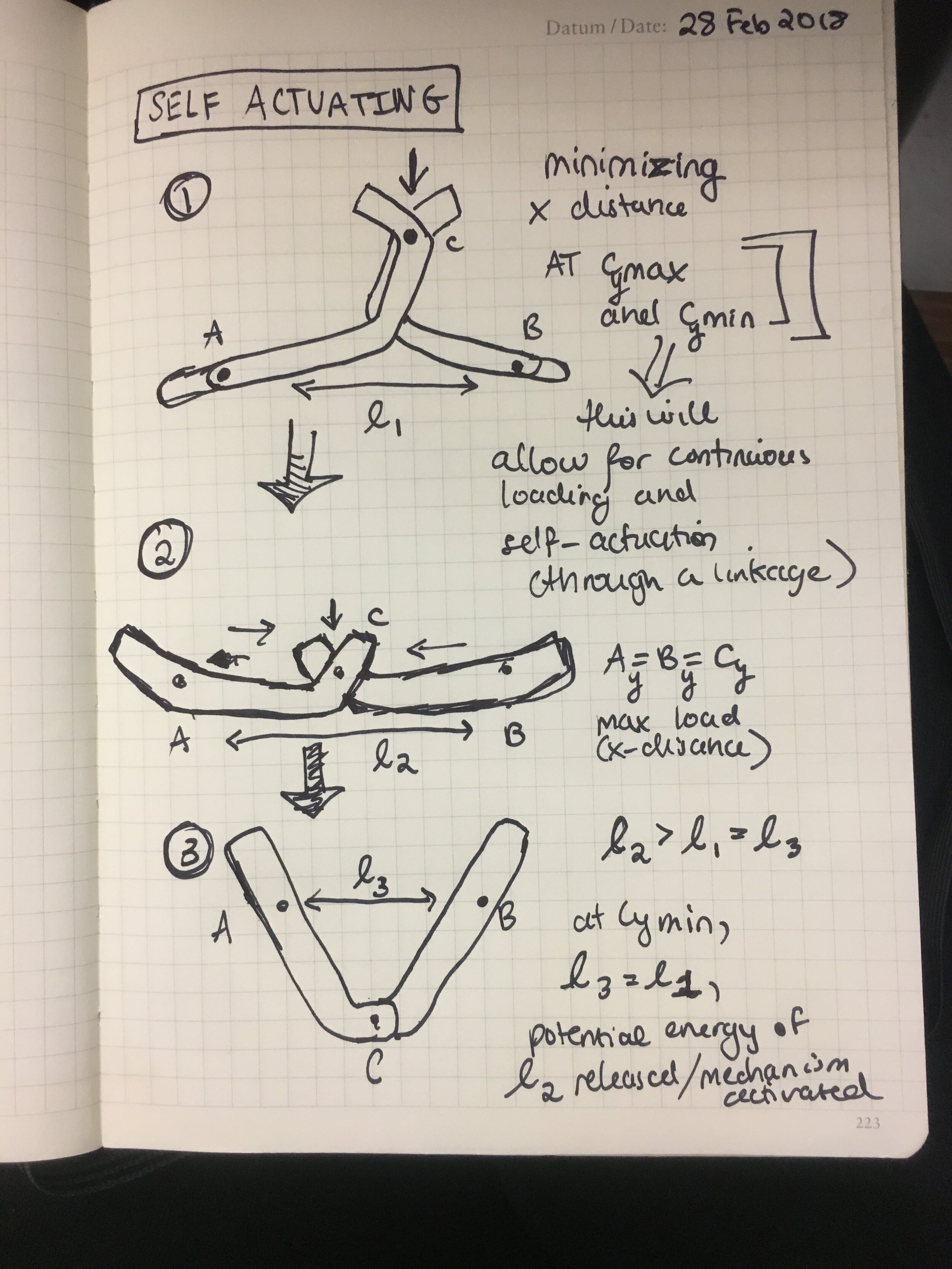
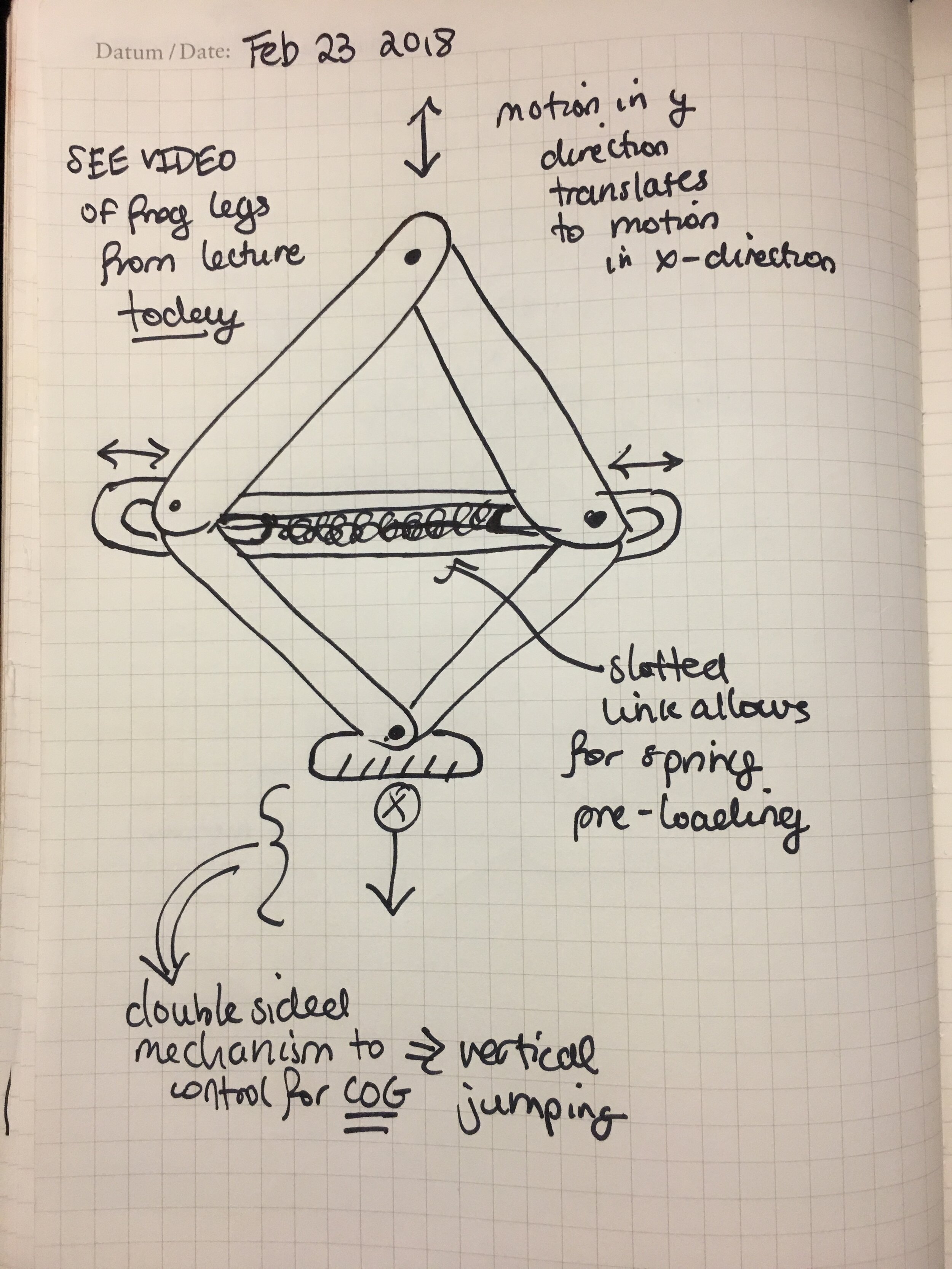
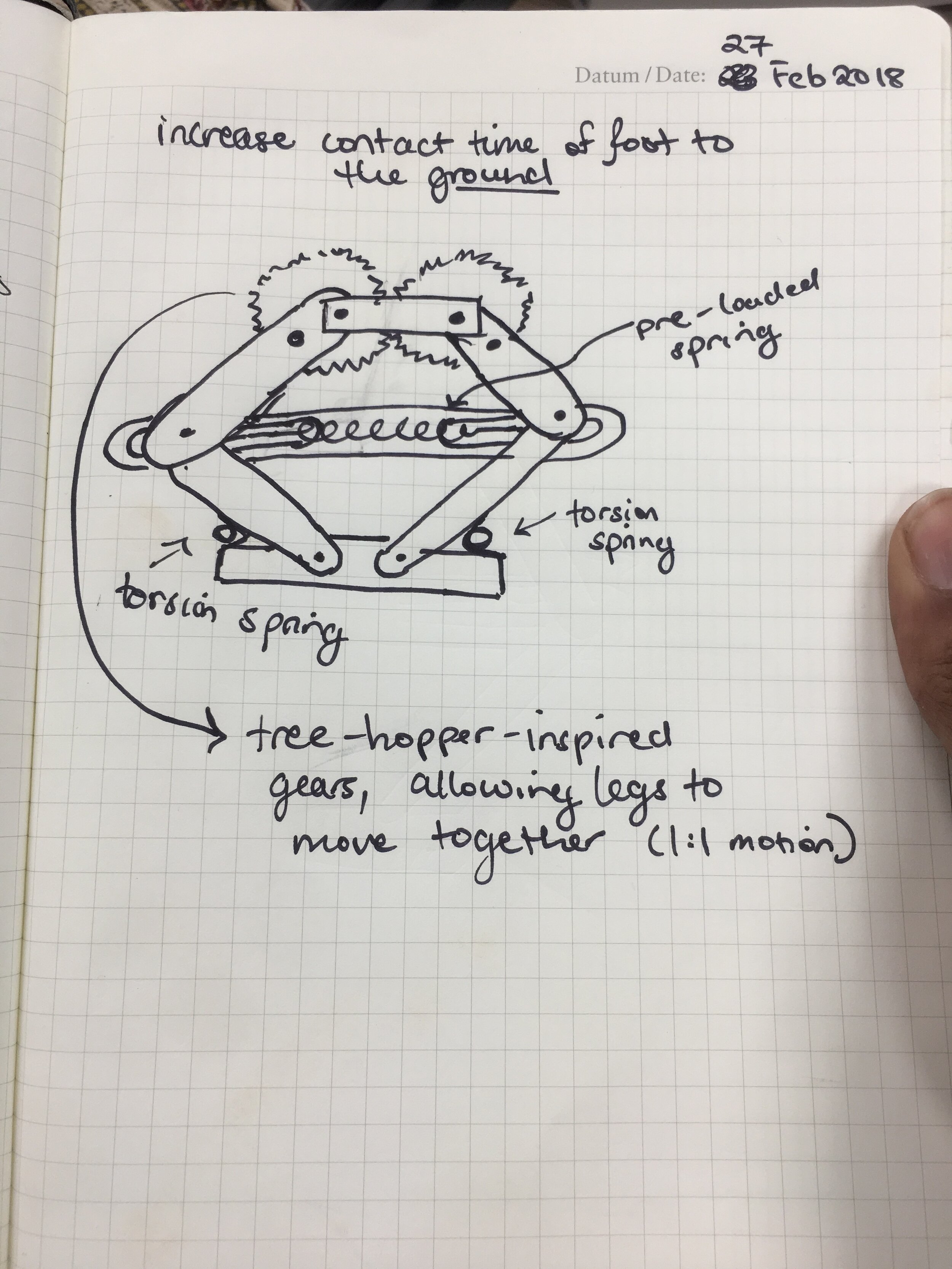
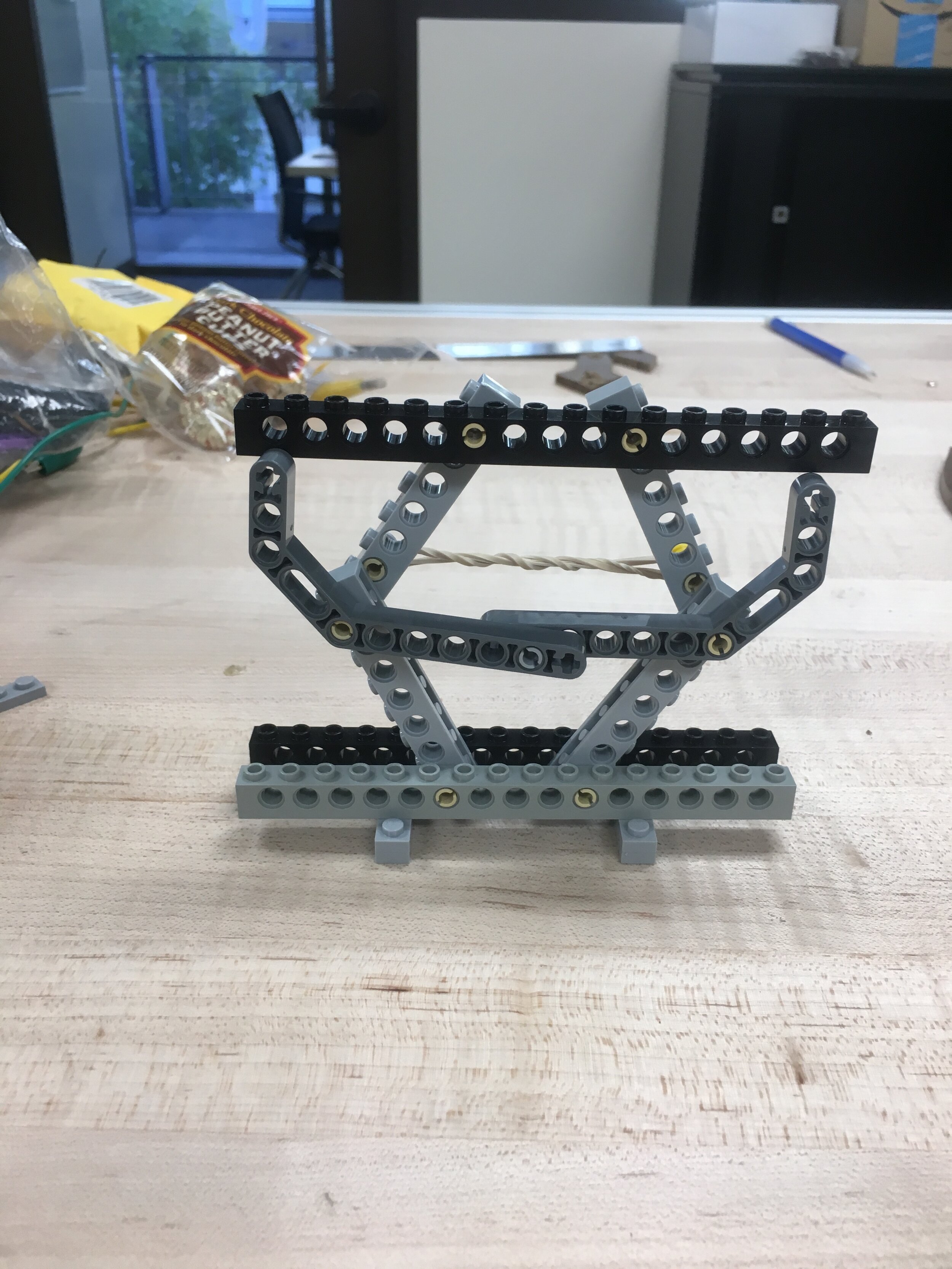
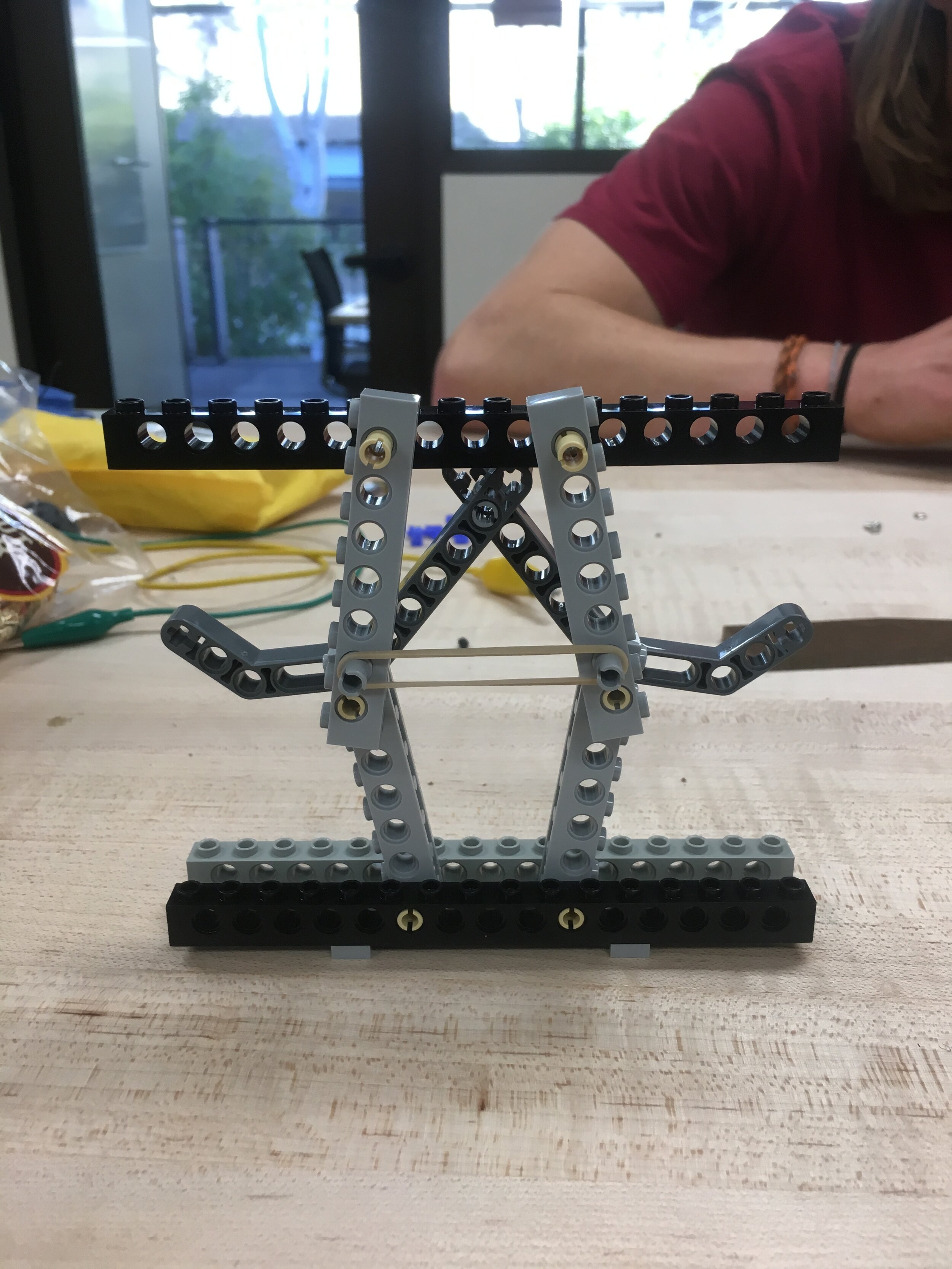
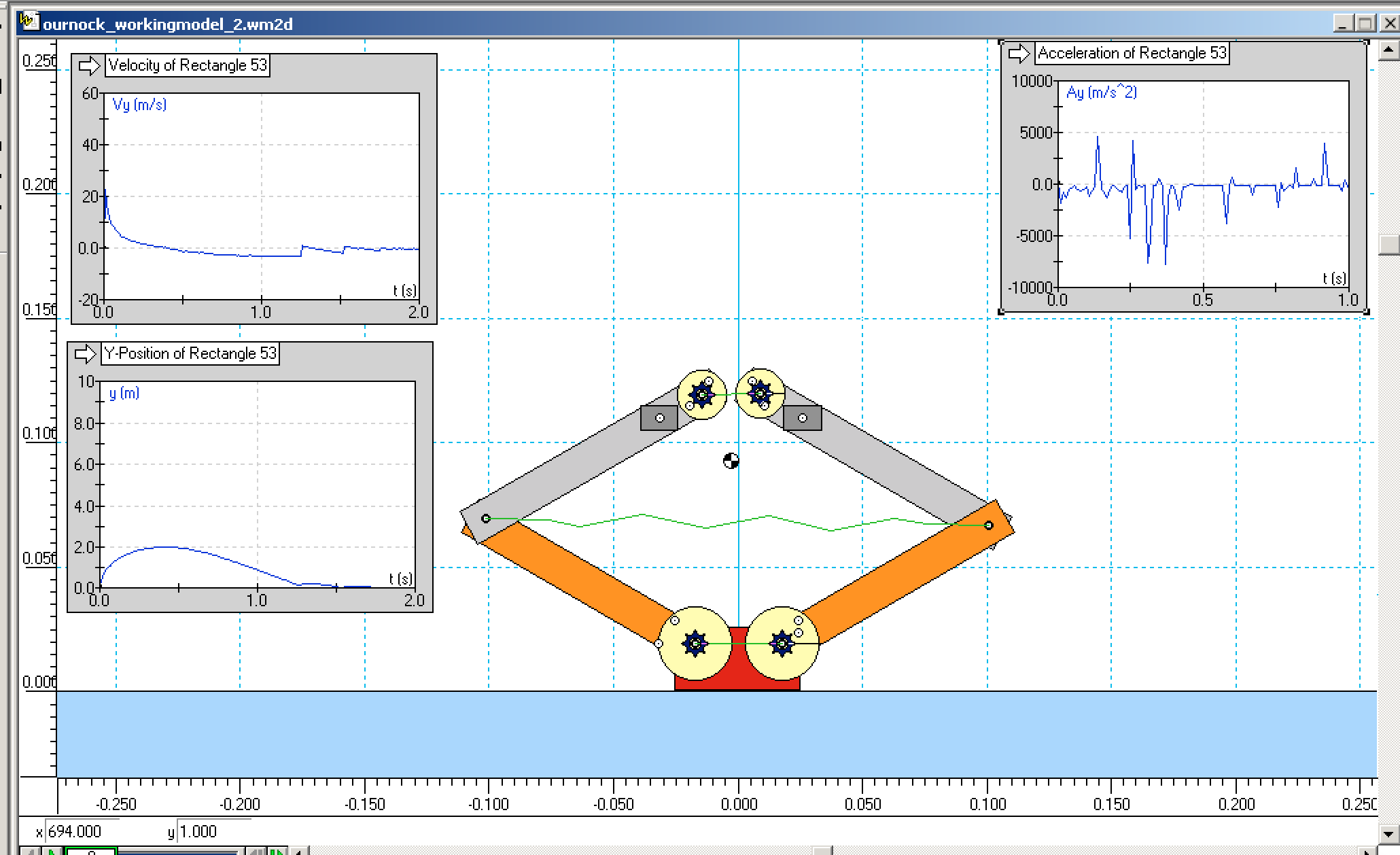
Description: A fully realized design for a biomimetic jumping robot in two weeks. The robot, intended to start on from the ground, must convert energy from a battery into stored mechanical energy within 5 seconds and then self-actuate to complete a one-meter jump.
Components:
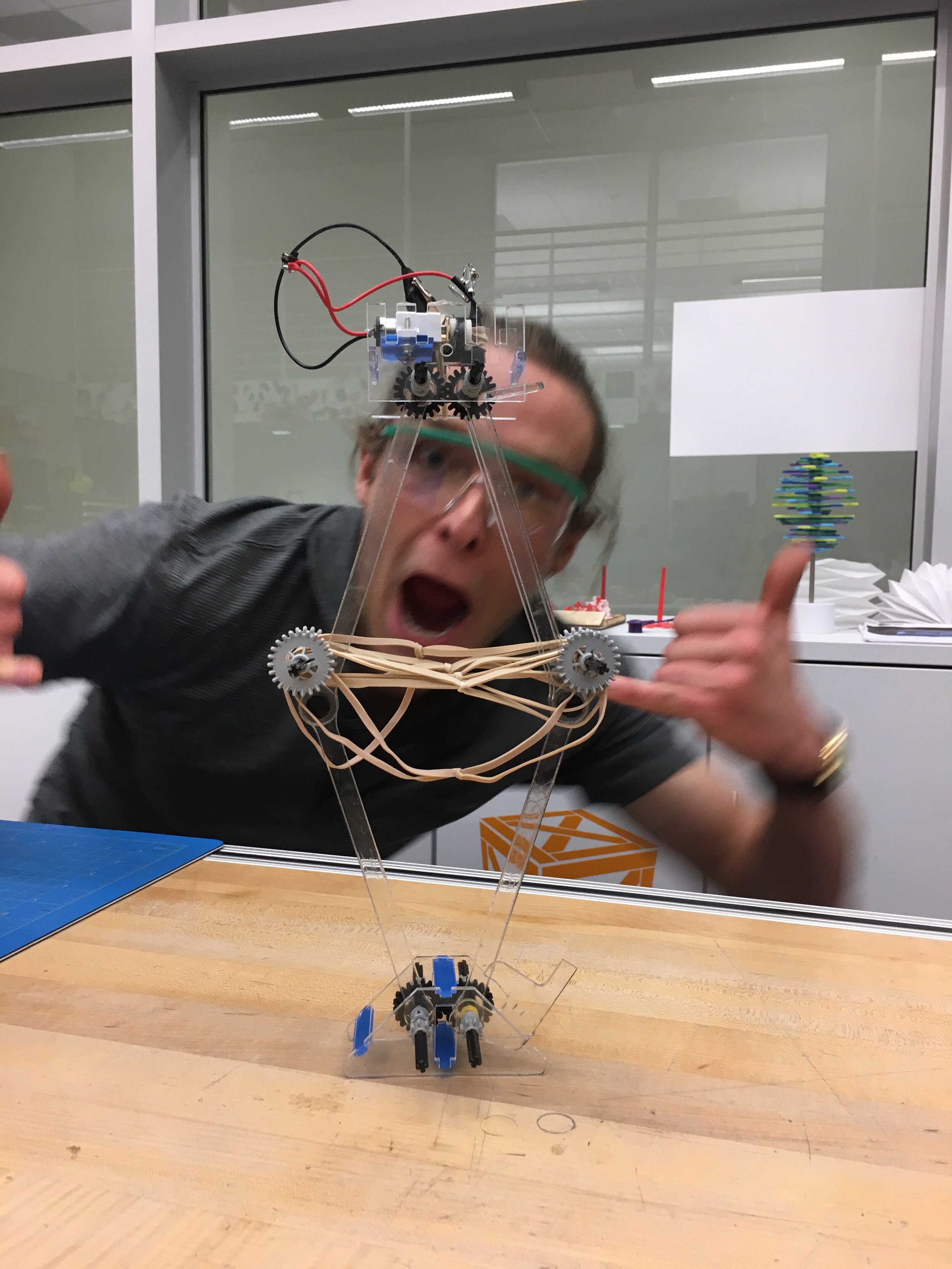
Purchased - Micro DC Motor, LiPo Batteries, Lego Axles (Purchased)
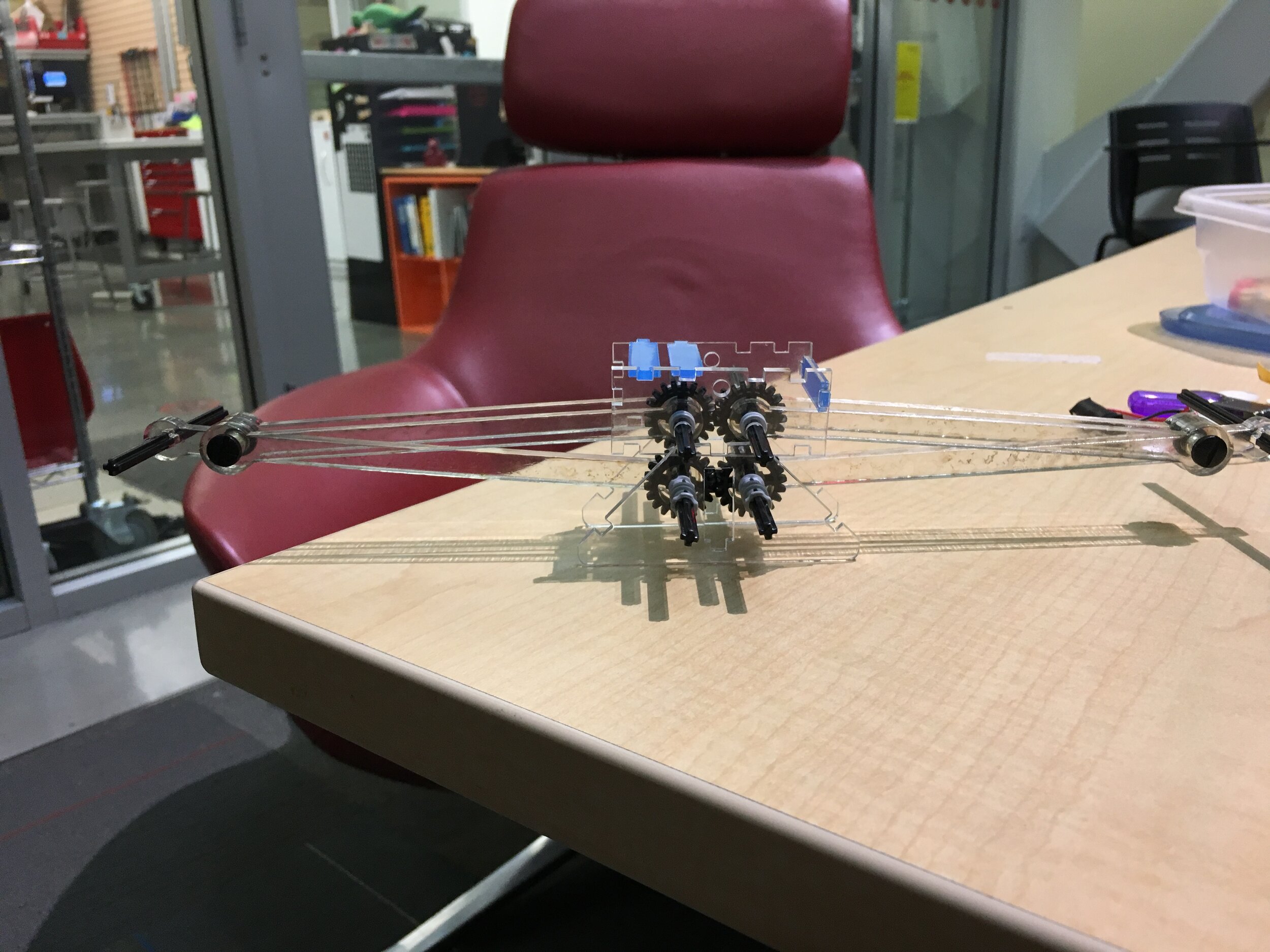
Machined - Lasercut Acrylic Legs, Jigsaw Motor Encasing, 3D Printed Gears/Couplings
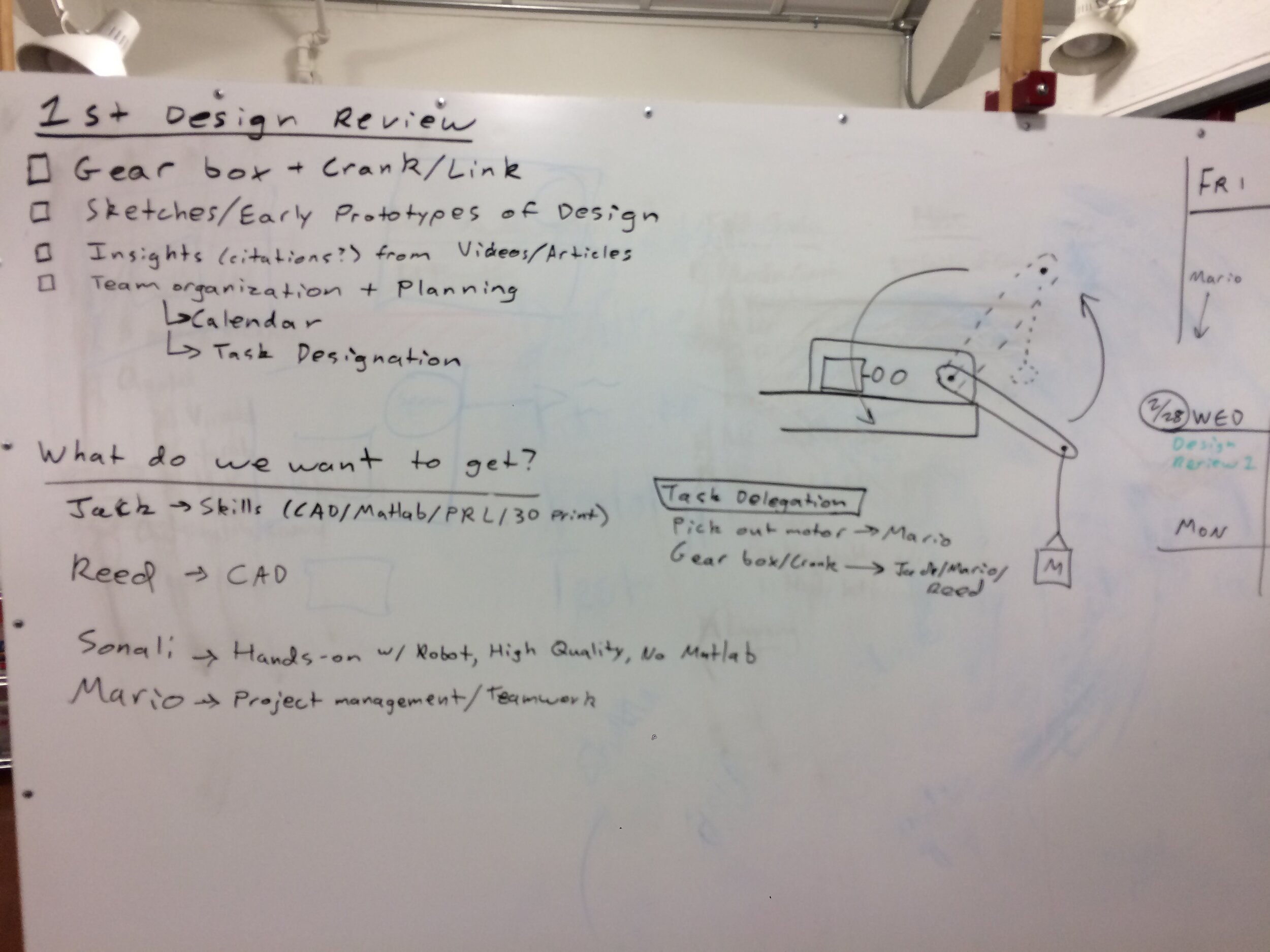
Lessons: Component Selection, Design for Mass Efficiency, System Modeling (FEA, Matlab), Rapid Prototyping