
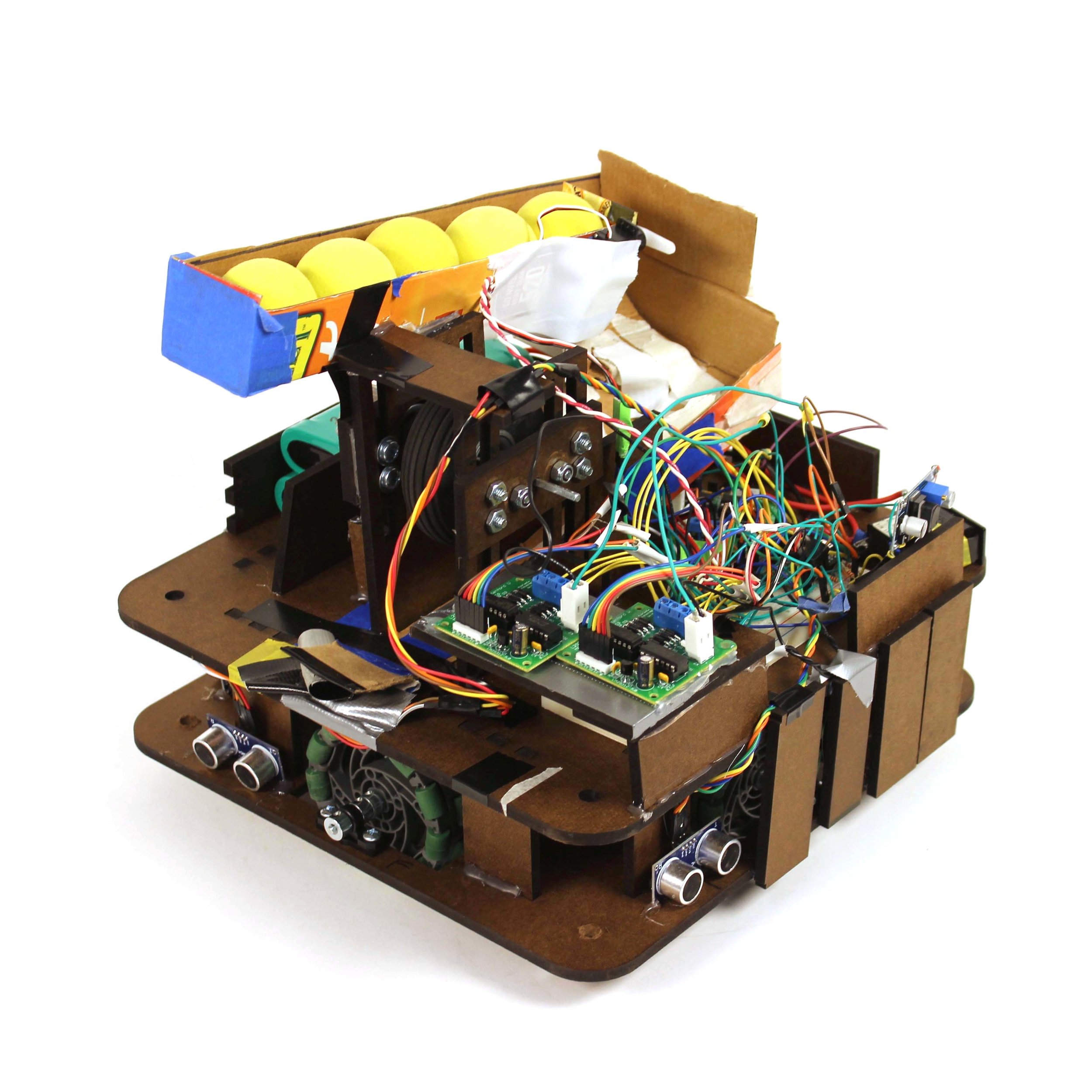
flywheel - autonomous robot
This autonomous bot was my final project for Introduction to Mechatronics. The bot was built in the final two weeks of the course in groups of four engineers. In total, thirty-two Teensy LC powered bots competed head to head in an elimination bracket. Our bot placed 3rd out of 32 teams of graduate students.
THE TASK
In 2 mins 10s, autonomously navigate the game board to a loading location, load ammunition (yellow nerf balls), locate your opponent’s towers, and shoot them down. The team with the most towers knocked down wins.
THE CONSTRAINTS
Two week time frame
Profile must be smaller than 12”x12”x12”
Material cost must be under $200
SKILLS/PROCESSES PRACTICED
Effective teamwork
Programming in C
PCB design
Team-friendly CAD
Laser cutting
Drivetrain design

Servo Gate + Flywheel Ball Launch Mechanism

Emergency Switch - Connected to Voltage Regulator

Jigsaw Puzzle CAD Model - LaserCut in Duron

Drivetrain Utilizing OmniWheels

Motor Drivers + Schematic

Ultrasonic Sensor + Schematic - Four Used